
En este tutorial te guiaremos paso a paso para construir tu propio robot sumo controlado por Bluetooth, combinando potencia, precisión y control remoto. Un robot sumo es un tipo de robot diseñado para empujar a su oponente fuera de un área designada, lo que lo convierte en una excelente oportunidad para aprender sobre mecánica, electrónica y programación. Utilizaremos un microcontrolador Arduino Nano, la tarjeta Tapatio Motor Board y un módulo Bluetooth para permitir que controles tu robot desde un smartphone o un dispositivo compatible, ofreciendo una experiencia de manejo en tiempo real. Este proyecto es ideal para estudiantes y aficionados a la robótica que buscan competir o aprender sobre la creación de robots autónomos. ¡Prepárate para armar, programar y dominar la arena con tu robot sumo!
Requisitos de software
- Arduino IDE (link)
- Smartphone con Android
Requisitos de hardware
- Tarjeta Tapatio Motor Board
- Driver Tapatio (incluidos en la tarjeta) (Comprar por separado)
- Chasis (ejemplo de chasis)
- Motores (del tipo que gustes)
- Bluetooth (HC-05 ó HC-06)
- Batería
Instrucciones de Armado
Para realizar el ensamble del robot Sumo RC (Aplica para cualquier Robot RC con motores), se debe partir del chasis, el cual puede ser impreso en 3D o cualquier otro material que se guste como MDF, Metal, etc. a continuación se toma como base un modelo STL obtenido de Cults 3D, el cual puede ser descargado de forma gratuita e impreso en 3D.


Cabe mencionar que el modelo seleccionado no es autoría de nosotros, sin embargo, está publicado de forma gratuita en el sitio de Cults 3D.
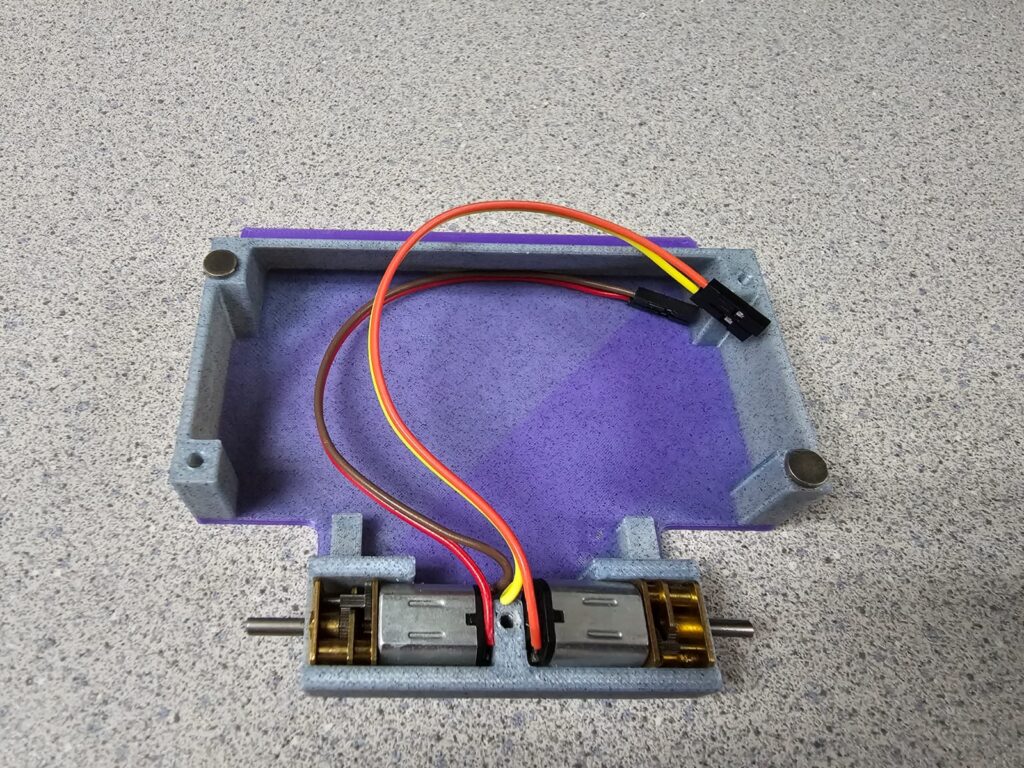
Una vez que tenemos el chasís listo se colocan los motores y se agrega la tapa para fijarlos y estos no se muevan como se se muestra la siguiente imagen.

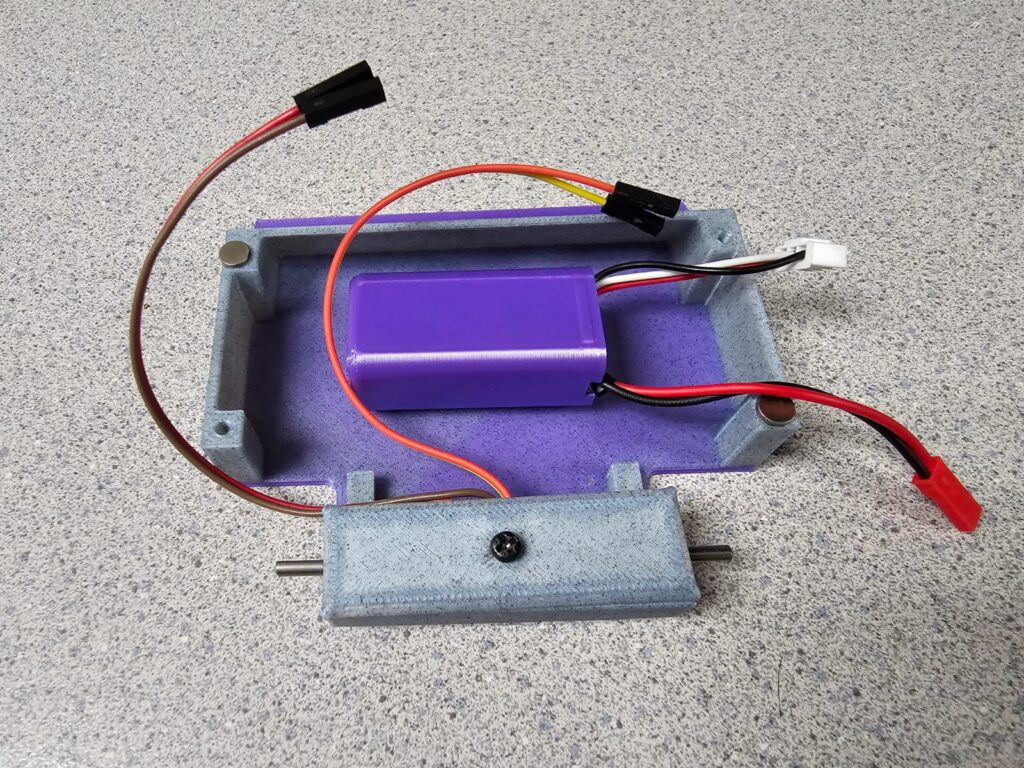
Los siguientes pasos no necesariamente se tienen que seguir en orden, dependerá de la forma en la que se desee completar el robot RC, sin embargo, como muestra del ensamble se coloca y se sujeta la batería en el espacio del chasís, como se ven las siguiente imagen.
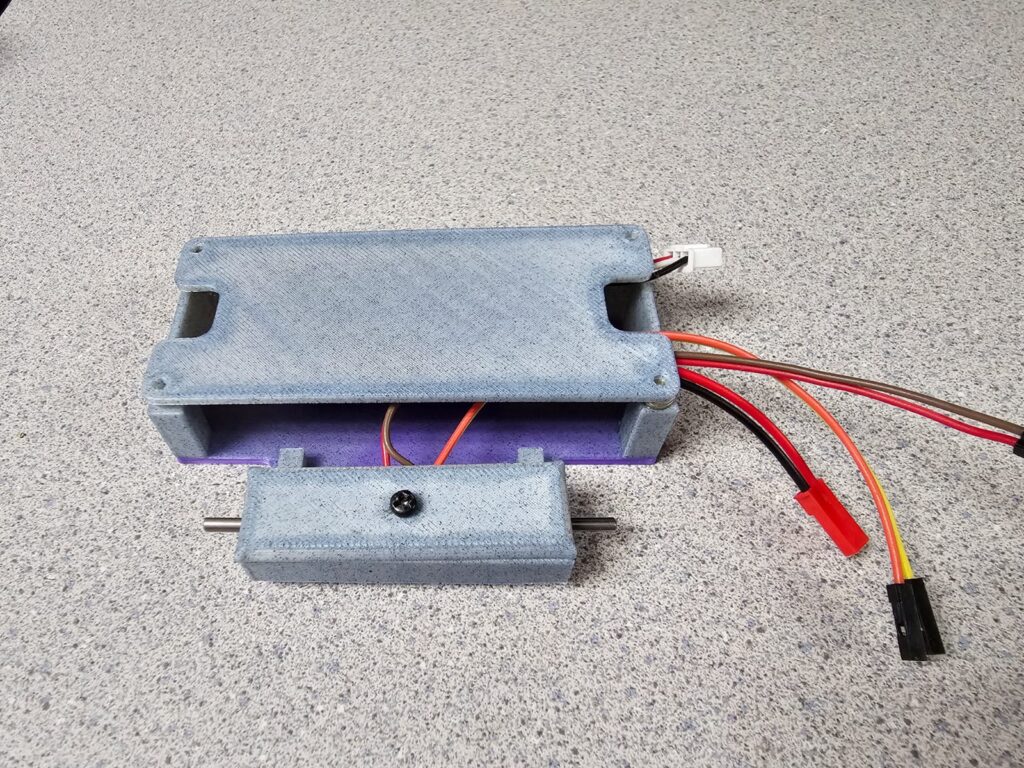
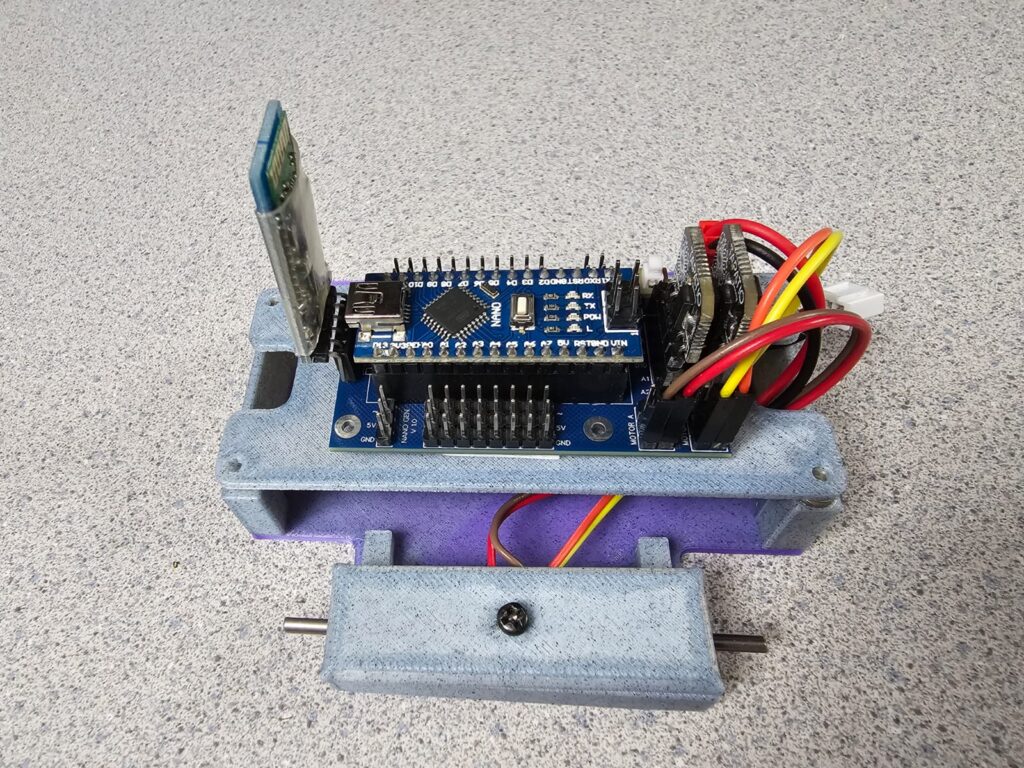
Se procede a instalar la tapa de robot de RC, sacando los cables por uno de los edificios al extremo de la tapa para que una vez que se encuentre fija, se pueda conectar la electrónica sin ningún problema. Cómo se muestran las siguiente figura
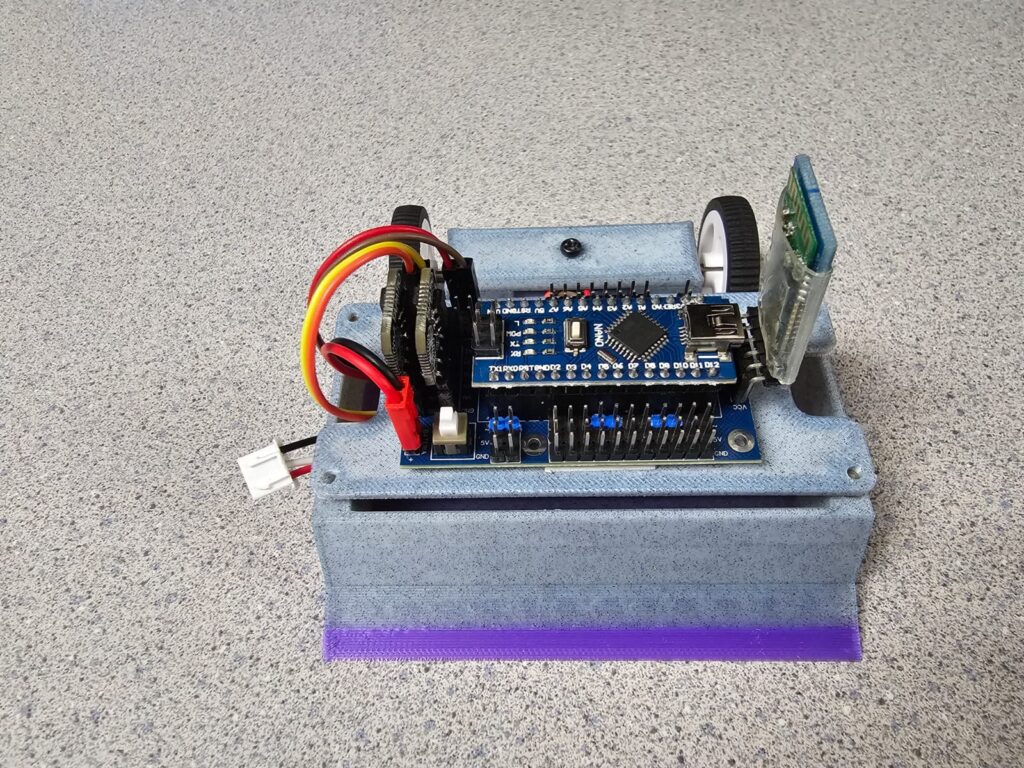
Colocaremos sobre la tapa la tarjeta tapatío motor Board, la cual permite conectar hasta seis motores controlados con tres amperes, la tarjeta puede ser fijada con tornillos o con cinta doble cara para lograr que quede fija y no esté moviendo. El procedimiento se puede observar en la siguiente imagen.
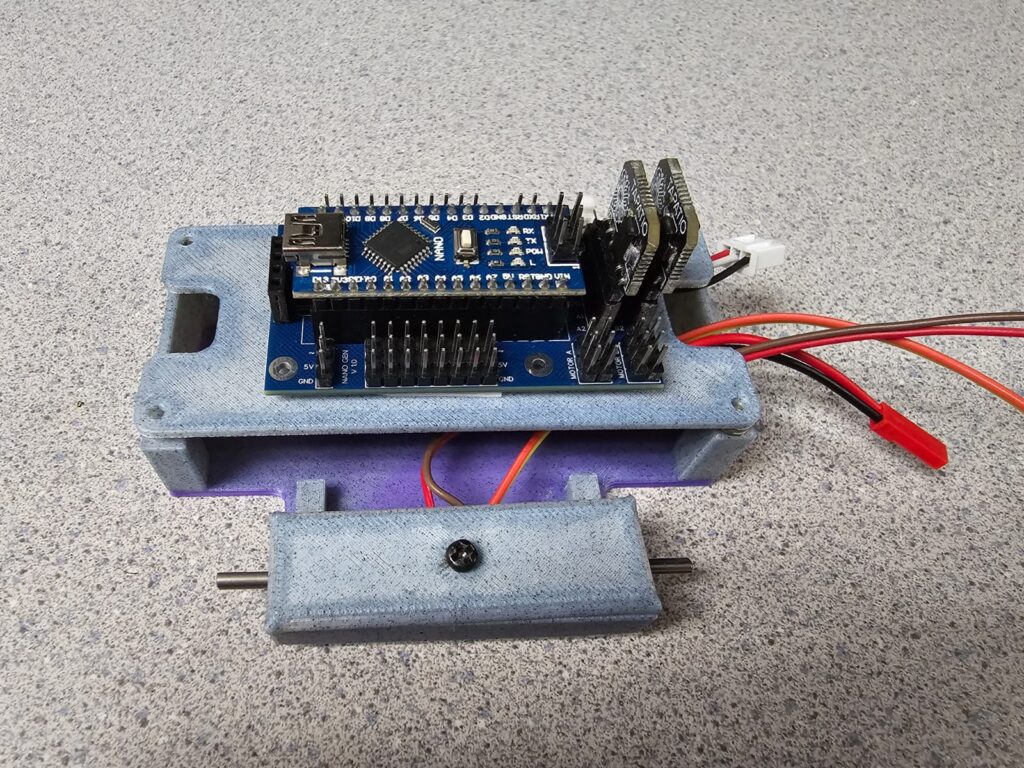
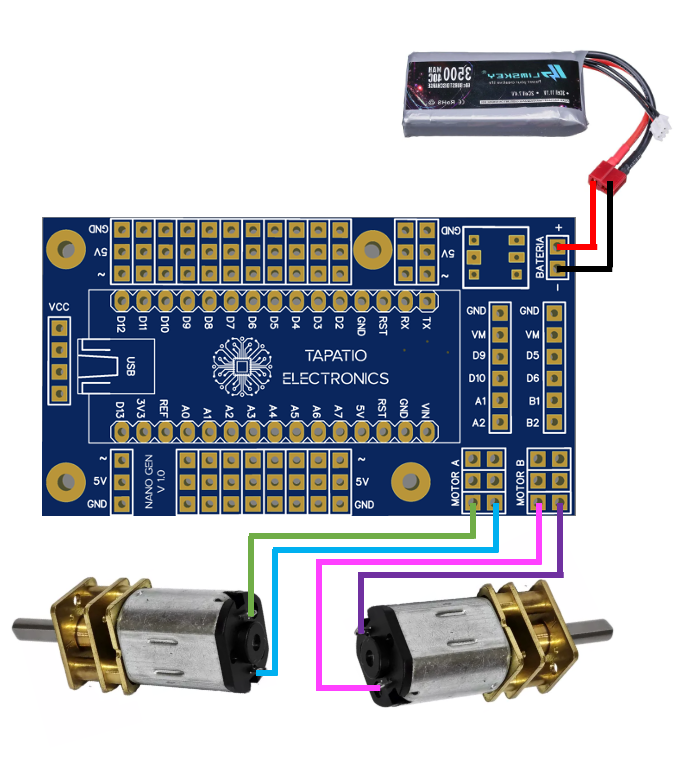
es momento de conectar los componentes electrónicos a la tarjeta, este proceso es muy sencillo, pues viene indicado en cada uno de los pines su funcionalidad en la tarjeta. En este caso ubicaremos los conectores denominados «Motor A» y «Motor B», donde colocaremos los cables proveniente de cada uno de los motores, además, identificaremos el conector para la batería, el cual se encuentra a un lado del botón de encendido, hay que tener muy en cuenta la polaridad de la batería, por lo que debemos asegurarnos que el cable rojo (positivo), coincida con el conector marcado con el símbolo «+» y el cable negro (negativo) coincida con el pin marcado como «-«, como se muestran las siguientes imágenes.
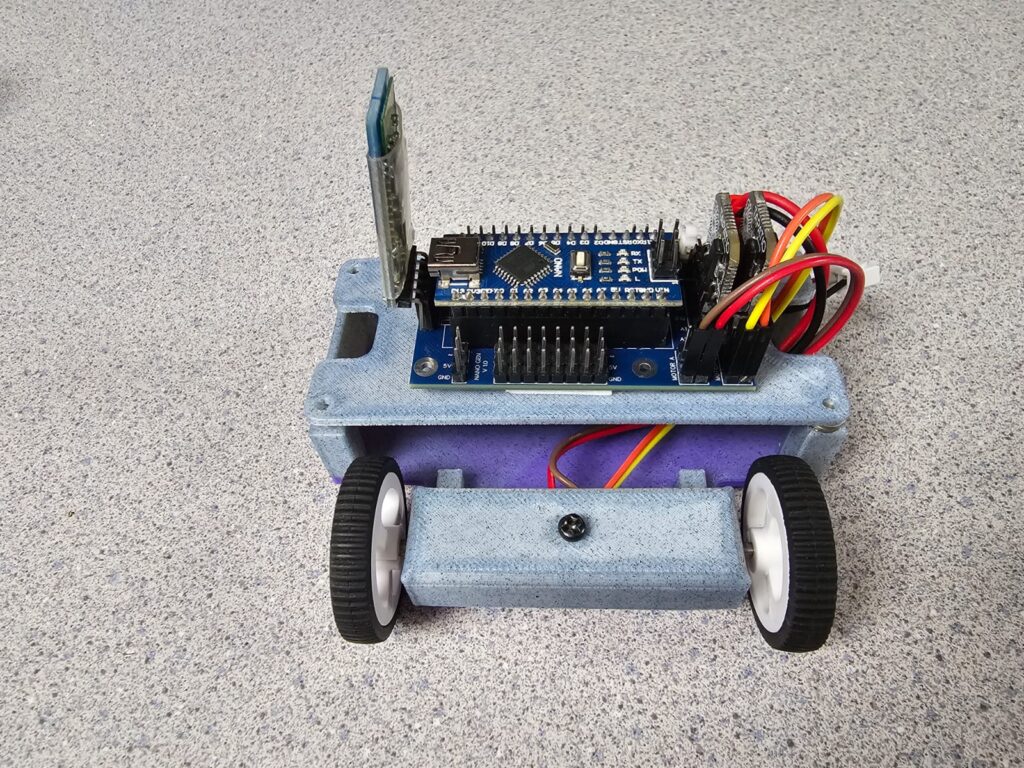
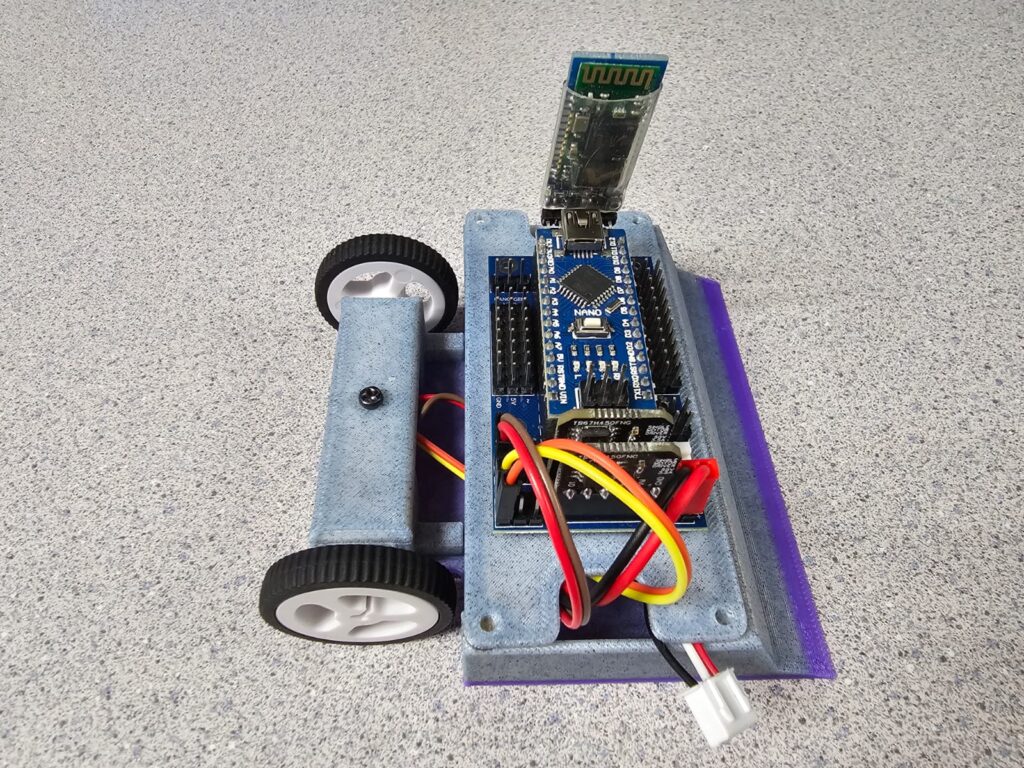
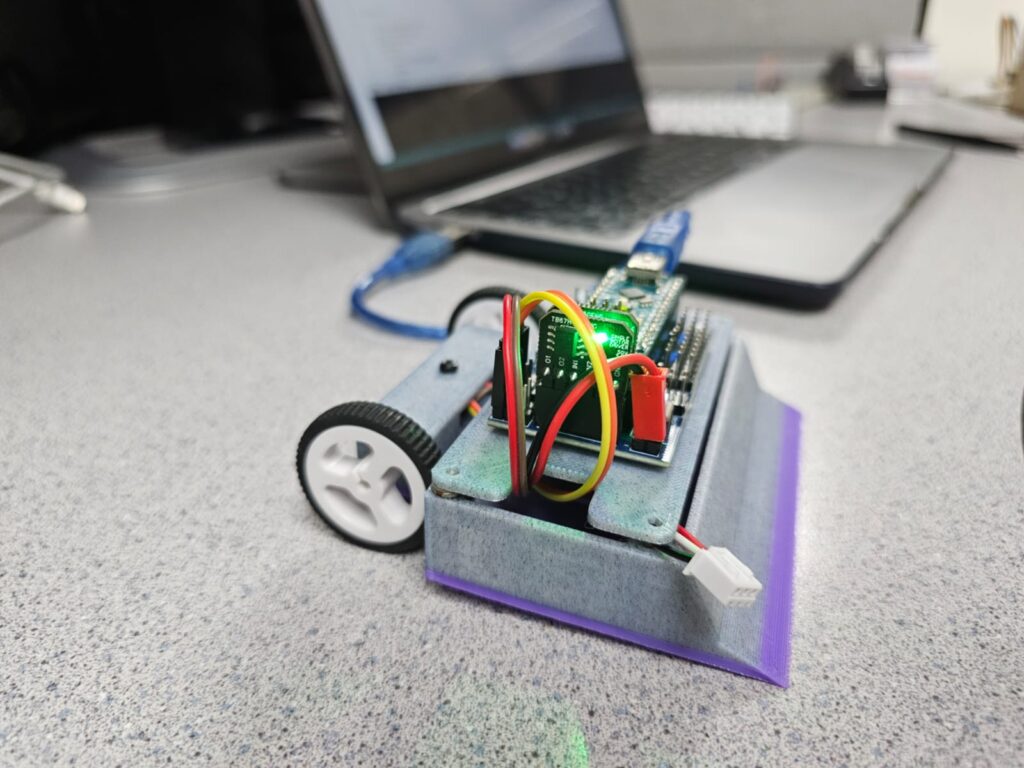
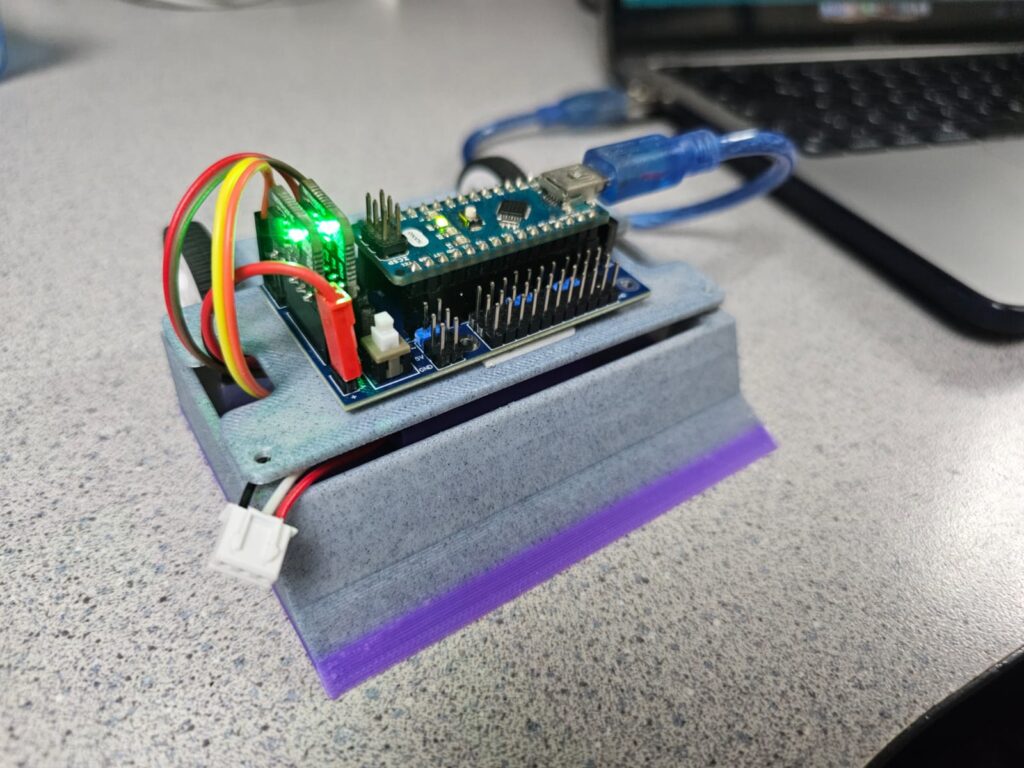
Para terminar el apartado de ensamble y pasar al apartado de programación, será necesario colocar las ruedas, las cuales pueden ser de diferentes materiales, dependiendo del objetivo de nuestro Radiocontrol, ya que en algunos casos será necesario priorizar el agarre tracción, por lo que las ruedas deben ser de un material adecuado, en otros casos se debe priorizar altura e incluso pensar en ruedas omnidireccionales que permiten una mayor movilidad al robot. Para este ejemplo de robot se colocarán una ruedas estándar recalcando que no son las mejores. Sin embargo es sólo para ilustrar que el robot se moverá, este paso resultará crítico para algunas competencias, por lo que no se debe tomar a la ligera. el robot terminado se aprecia en las siguientes imágenes.
Cómo puedes ver el ensamble resulta muy sencillo y es gracias al diseño de la tarjeta Tapatío Motor Board, la cual es un excelente opción para aquellas personas entusiastas que quieren incursionar en este tipo de competencias, pero que los conocimientos en electrónica representan una barrera o simplemente se requiere una solución sencilla.
El siguiente paso es programar el robot para lo cual debemos abrir el IDE de Arduino, escribir el código y subirlo al micro controlador, recordando que el micro controlador utilizado es una Arduino nano que encaja perfectamente en la tarjeta, Tapatío Motor Board, el proceso se muestra en las siguientes imágenes, además, se deja un archivo ZIP, con el código necesario para controlar el robot de RC.
/*
Codigo base para robot RC, utilizando la placa Tapatio Motor Board
By: Miguel Angel Delgado López - miguel.delgado.lop@gmail.com
*/
//Velocidad con la que quieres que se mueva el robot
//debe ser un valor máximo de 255 y dependerá de lo motores que uses
int velMax=110;
//Pines necesario para controlar los diver Tapatio Driver
#define M01 9
#define M02 10
#define M03 5
#define M04 6
//Configuracion de los pines como salida e iniciar el Bluetooth
void setup() {
Serial.begin(9600);
pinMode(M01,OUTPUT);
pinMode(M02,OUTPUT);
pinMode(M03,OUTPUT);
pinMode(M04,OUTPUT);
}
//Método principal que al recibir una letra hace que se mueva el robot RC
void loop() {
if (Serial.available() > 0) {
char in = Serial.read();
Serial.println(in);
switch(in){
case 'w': //ADELANTE
velocidad(velMax,velMax);
break;
case 's': //ATRAS
velocidad(-velMax,-velMax);
break;
case 'a': //GIRO IZQUIEDA
velocidad(-velMax*2,velMax*2);
break;
case 'd': //GIRO DERECHA
velocidad(velMax*2,-velMax*2);
break;
default: //DETENER
velocidad(0,0);
}
}
}
//Método que permite controlar la velocidad y sentido de giro a los motores
//El valor minimo es -255 y el máximo 255, Negativo hacia atrás y positivo hacia adelante
void velocidad(int izq, int der){
if(izq>255){
izq=255;
}else{
if(izq<-255){
izq=-255;
}
}
if(der>255){
der=255;
}else{
if(der<-255){
der=-255;
}
}
if(izq>0){
analogWrite(M01,izq);
analogWrite(M02, 0);
}else{
analogWrite(M01, 0);
analogWrite(M02, abs(izq));
}
if(der>0){
analogWrite(M03,der);
analogWrite(M04, 0);
}else{
analogWrite(M03, 0);
analogWrite(M04, abs(der));
}
}

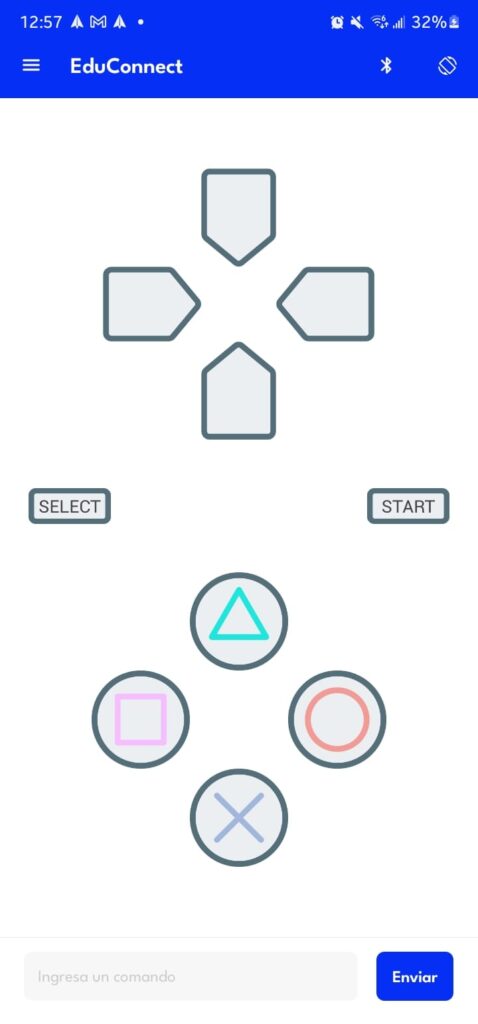
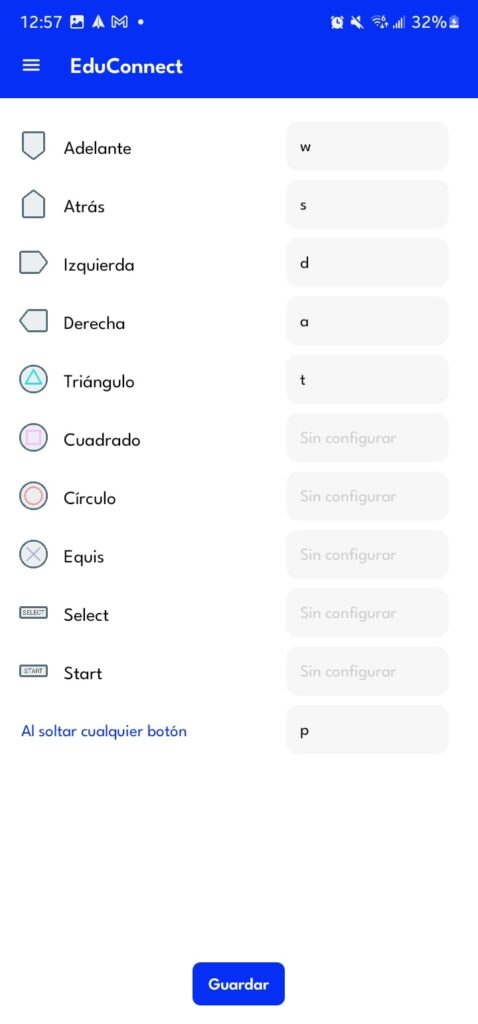
para controlar el robot de RC, es necesario instalar en el dispositivo móvil la aplicación llamada «Edu Conect», la cual puede ser descargada del Play Store es gratuita y no tiene y no tiene publicidad, al instalarla se debe configurar por lo que debemos entrar al menú de configuración y asignar los comandos necesarios para mover el robot como se muestra en la siguiente figura.
Finalmente, estaríamos listos para poder disfrutar de este RC, participar en competencias y sobretodo divertirse.